


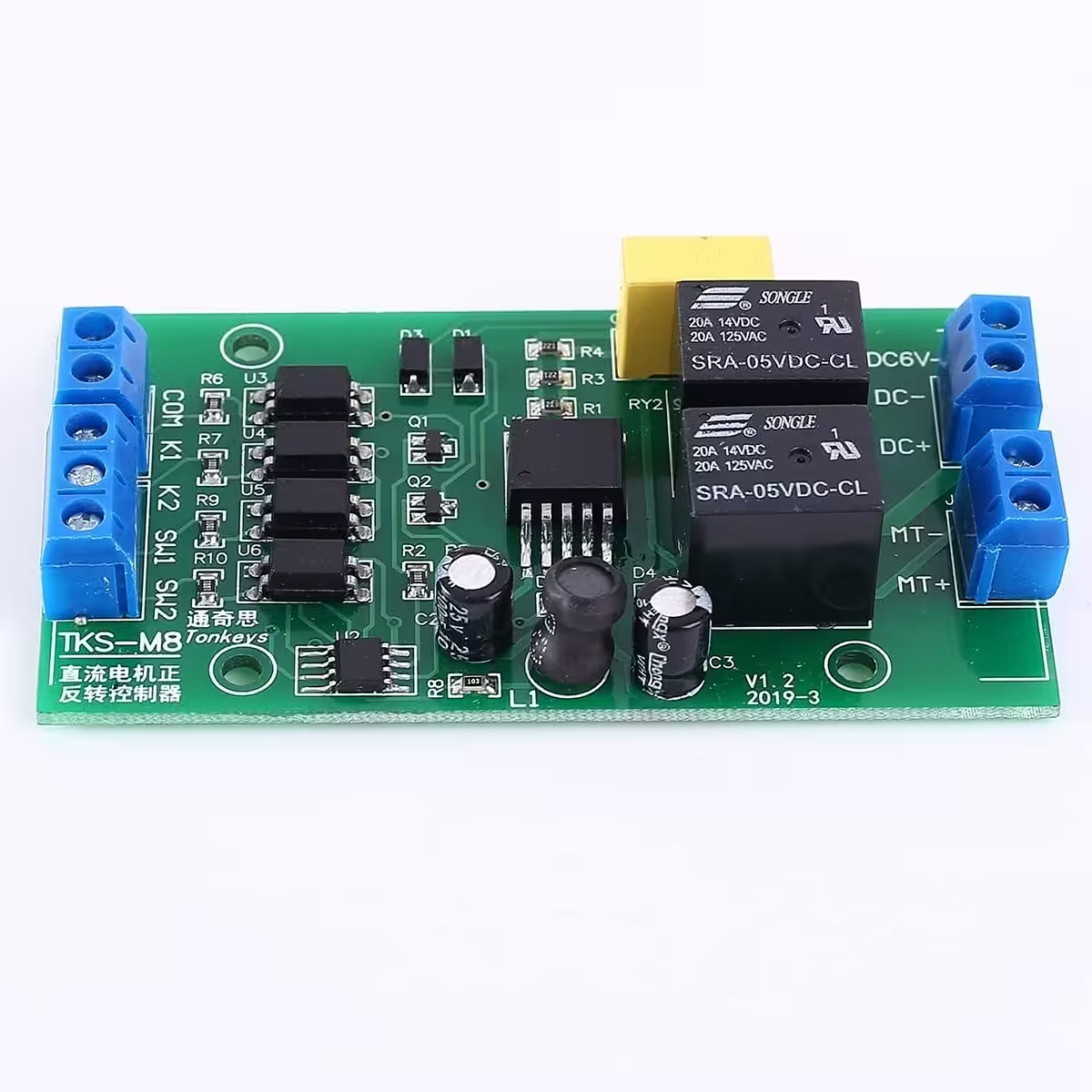
DC-moottorin suunnanvaihto-ohjain – tarkka ohjaus ilman monimutkaisia kytkentöjä
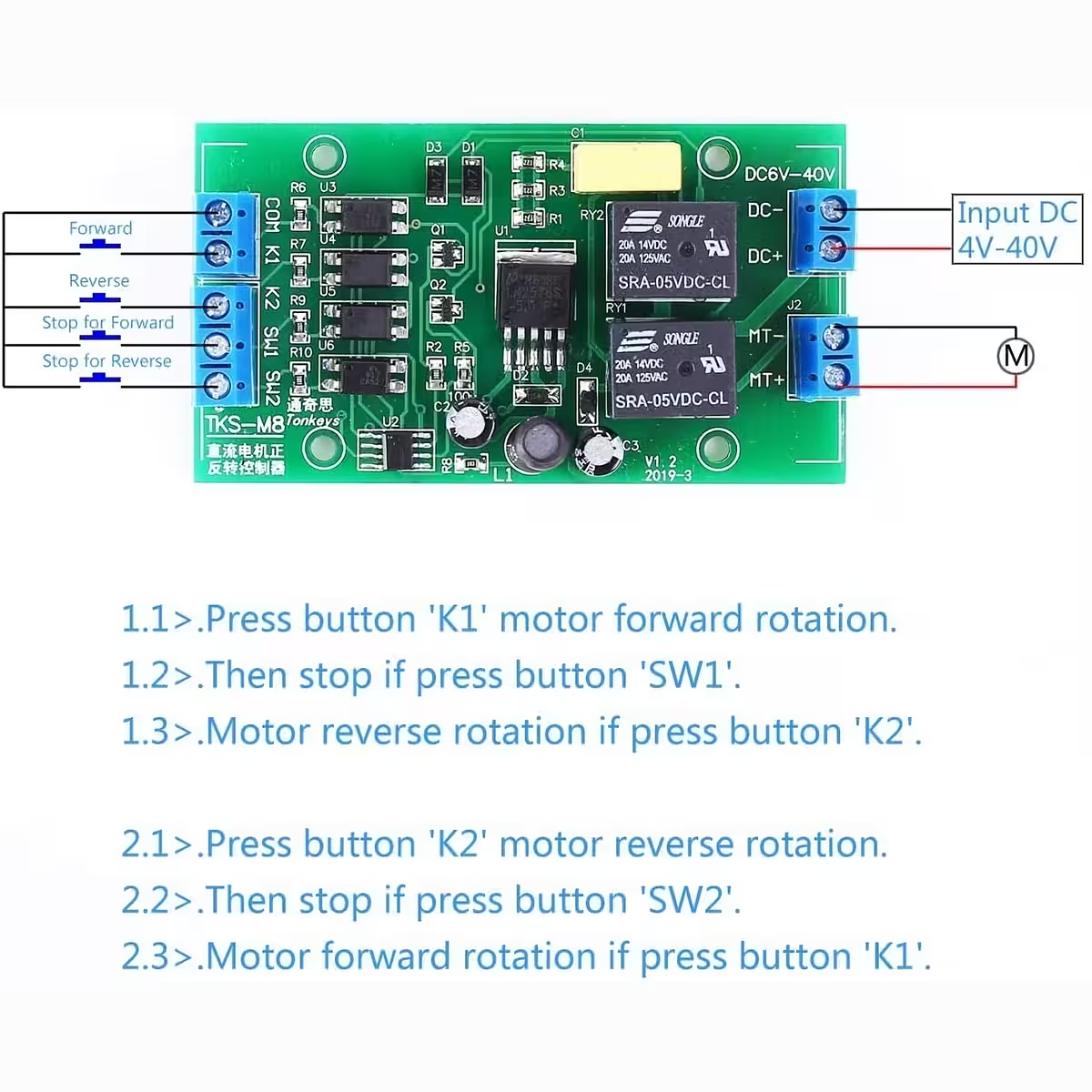
Rakennatko lineaariaktuattoria, suunnanvaihtomekanismia tai muuta DIY-projektia, joka vaatii moottorin suunnan tarkkaa hallintaa? Ilman erillistä ohjainmoduulia joutuisit turvautumaan releisiin, transistoreihin ja sotkuisiin johtoviritelmiin. Tämä kompakti DC-moottorin ohjain hoitaa kaiken yhdellä moduulilla: kytke vain virtalähde, moottori ja painikkeet, niin olet valmis muutamassa minuutissa.
Huomautus: Moottori saa saman jännitteen kuin virtalähde. Ohjain ei säädä moottorin jännitettä.
Miksi valita tämä ohjain? (Tärkeimmät edut):
- Laaja jännitealue: 4–40V DC — toimii suoraan LiPo-akkujen, laboratoriovirtalähteiden tai teollisuusvirtalähteiden kanssa ilman muutoksia.
- Jopa 20A lähtövirta — kestää moottoreiden korkeat käynnistysvirrat, soveltuu jopa n. 80W kuormille.
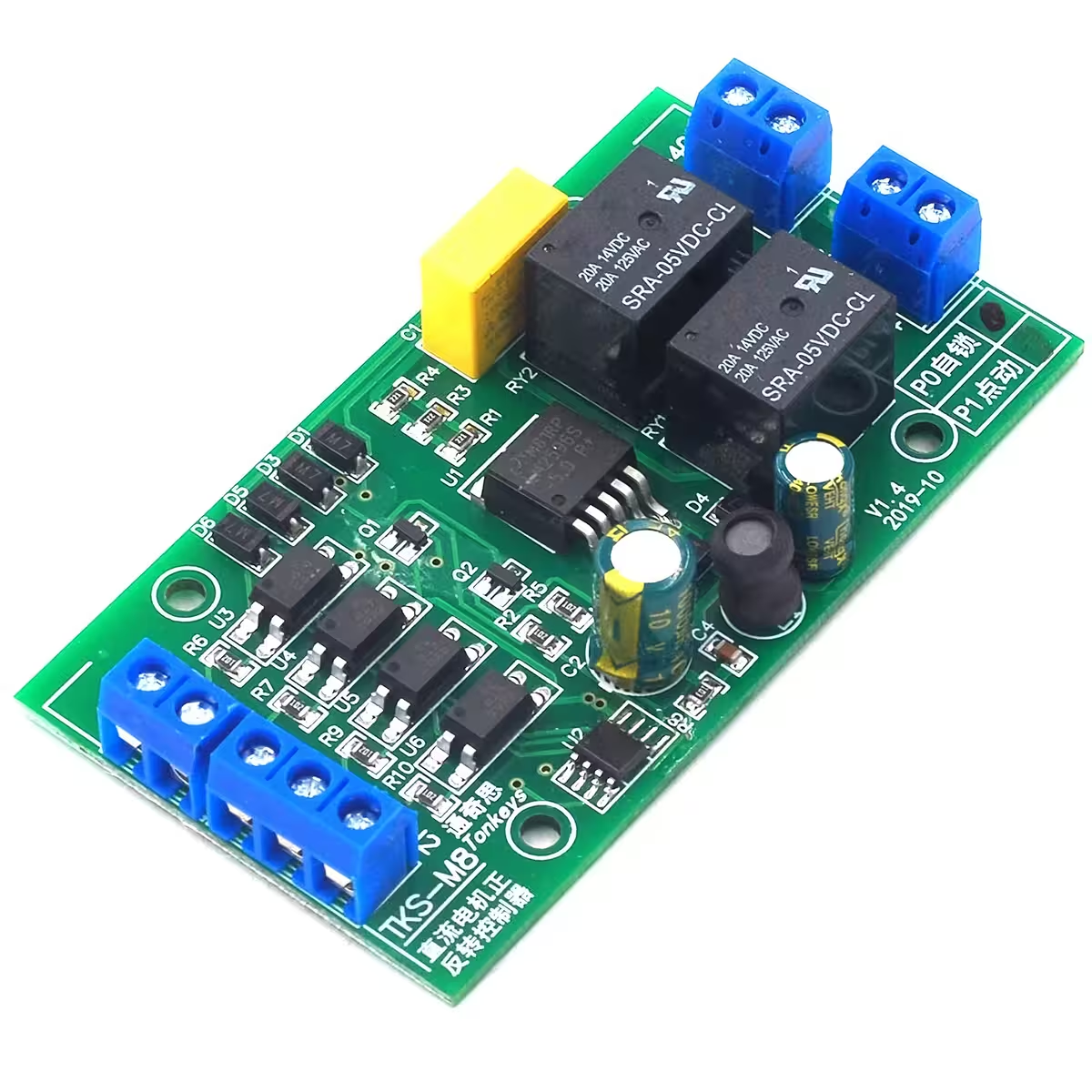
- Kaksi valittavaa tilaa (PO ja P1) — valitse joko jatkuva ajo (lyhyt impulssi käynnistää) tai jog-tila (moottori käy vain painiketta painettaessa).
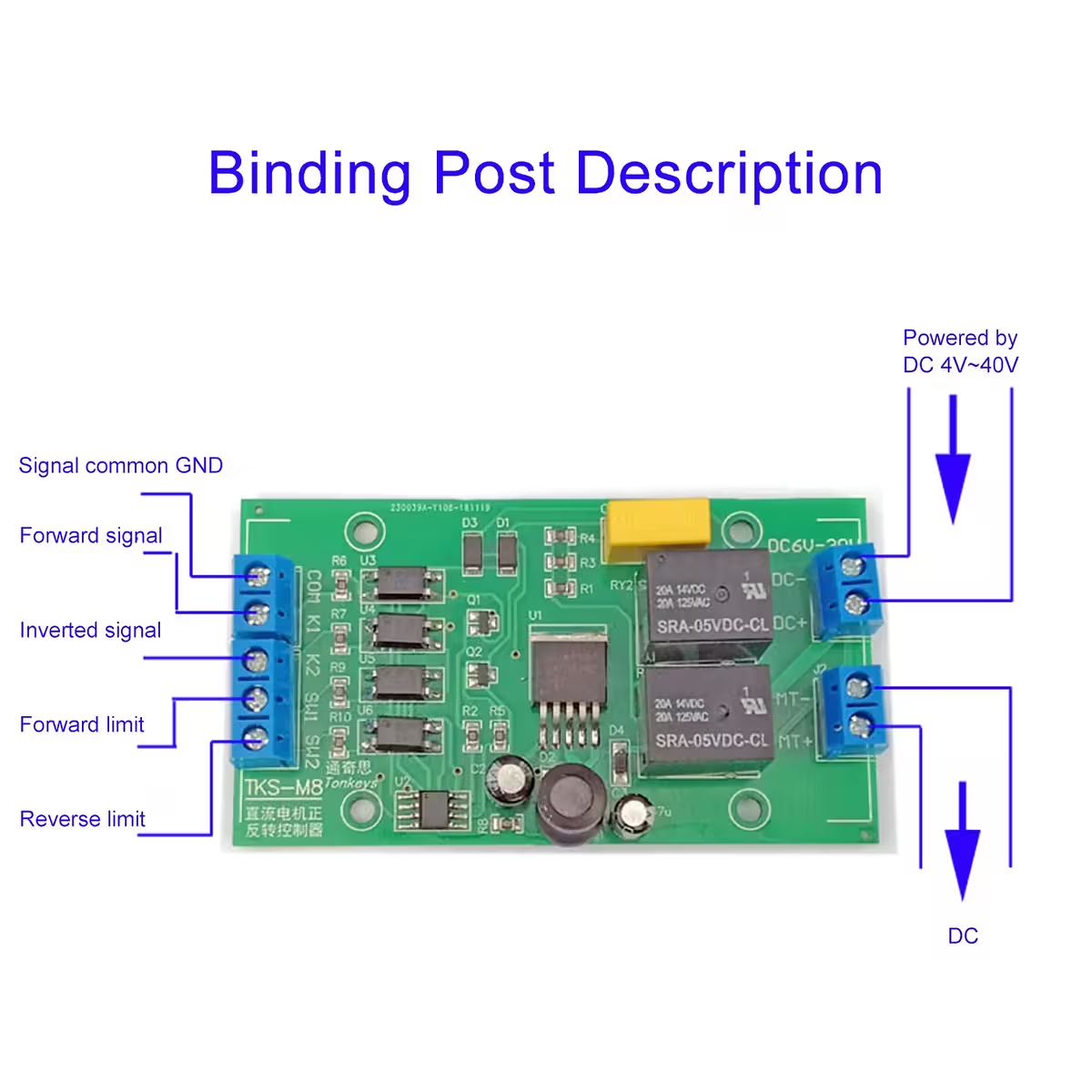
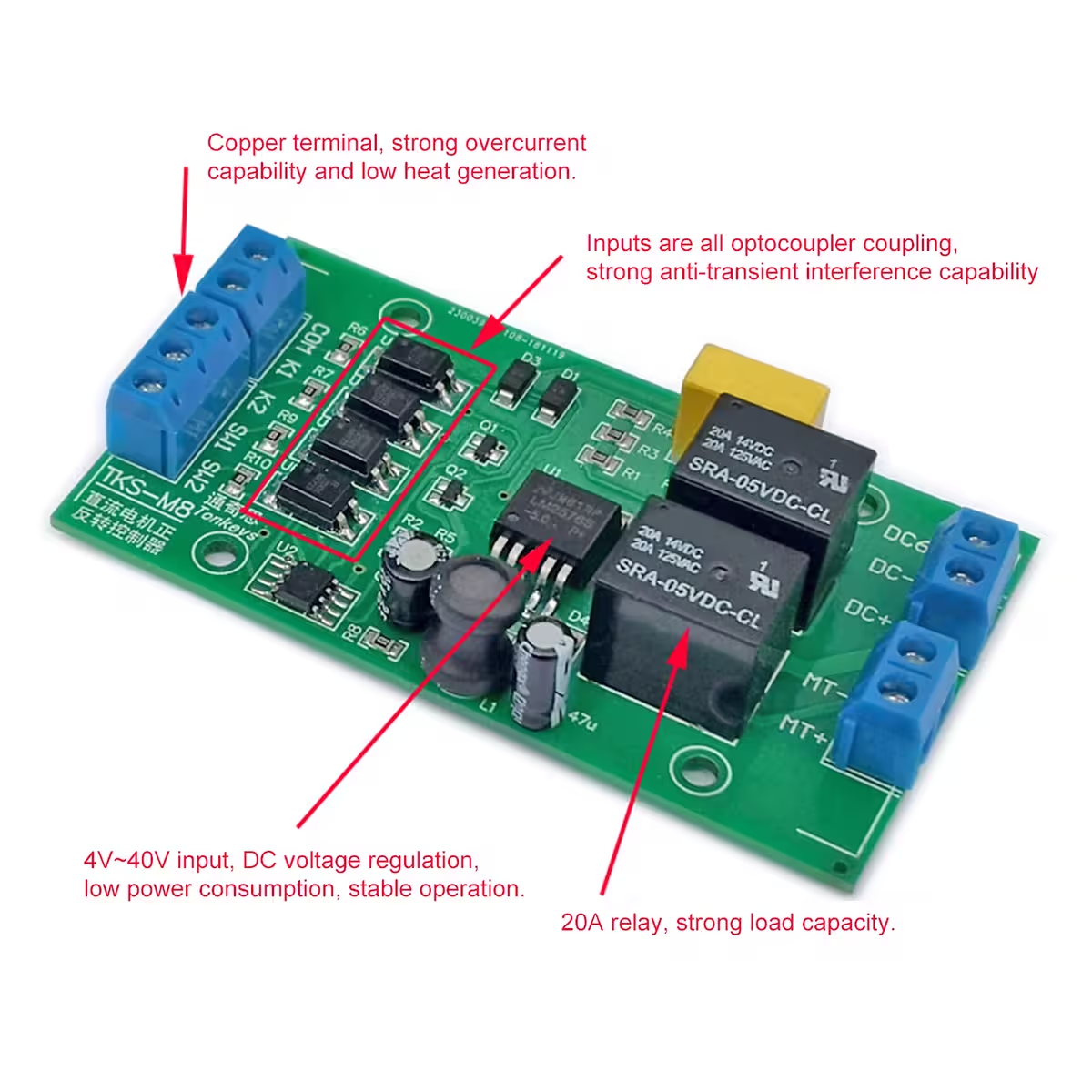
- Universaalit active-low-tulot — kytke suoraan tavalliset painikkeet, mekaaniset NO-rajakytkimet tai 3-johtimiset NPN-anturit ilman lisävastuksia.
- Integroidut SW1/SW2-rajakytkimet — automaattinen pysäytys liikeradan päässä estää mekaaniset vauriot ja ylikuormituksen.
- Pitkä käyttöikä >150 000 sykliä — luotettava valinta päivittäiseen käyttöön.
- Pieni virrankulutus: 0,6W aktiivisena / 0,1W valmiustilassa — ei tyhjennä akkua turhaan.
Tekniset tiedot ja suorituskyky
Ohjain hyödyntää active-low-tuloja: tulo aktivoituu, kun jännite laskee alle 2V. Tämä mahdollistaa tavallisten NO (normal-open) -painikkeiden, mekaanisten rajakytkimien ja 3-johtimisten NPN-NO-antureiden suoran kytkennän.
Vasteaika on n. 20ms K1/K2-komennoille ja n. 50ms SW1/SW2-rajakytkimille — riittävän nopea dynaamisiin sovelluksiin, mutta riittävän vakaa virheellisten laukaisujen välttämiseksi.
Suuremmilla jännitteillä suositeltu virta laskee: 12V jännitteellä voit käyttää täyttä 20A virtaa, kun taas 24V jännitteellä suosittelemme rajoittamaan virran n. 10 ampeeriin pitkäaikaisen luotettavuuden varmistamiseksi. Käytä aina asianmukaista sulaketta ja kuormitukselle mitoitettuja kaapeleita.
| Parametri | Arvo / Yksityiskohta |
|---|---|
| Käyttöjännite | DC 4–40V (suositus 6–36V) |
| Maksimi lähtövirta | jopa 20A (12V jännitteellä) |
| Suositeltu moottoriteho | jopa n. 80W |
| Moduulin kulutus (aktiivinen) | n. 0,6W |
| Moduulin kulutus (valmiustila) | n. 0,1W |
| Tulotyyppi | Active-low (aktivoituu jännitteellä < 2V) |
| Vasteaika K1/K2 | n. 20ms |
| Vasteaika SW1/SW2 | n. 50ms |
| Toimintatilat | PO (jatkuva) / P1 (jog) |
| Käyttöikä | >150 000 sykliä |
| K1-tulo | Eteenpäin-ajo (active-low) |
| K2-tulo | Taaksepäin-ajo (active-low) |
| SW1 | Eteenpäin-rajakytkin (suositus NO) |
| SW2 | Taaksepäin-rajakytkin (suositus NO) |
| VIN+ / VIN- | DC-syöttö 4–40V |
| Motor+ / Motor- | Lähtö DC-moottorille |
Ohjelmointi ja käyttöohjeet
PO-tila (Jatkuva ajo): Lyhyt impulssi K1– tai K2-tuloon käynnistää moottorin. Moottori käy, kunnes se saavuttaa rajakytkimen tai saa vastakkaisen komennon. Ihanteellinen automaatioon.
P1-tila (Jog): Moottori käy vain niin kauan kuin K1- tai K2-komento on aktiivisena. Ihanteellinen hienosäätöön ja manuaaliseen ohjaukseen.
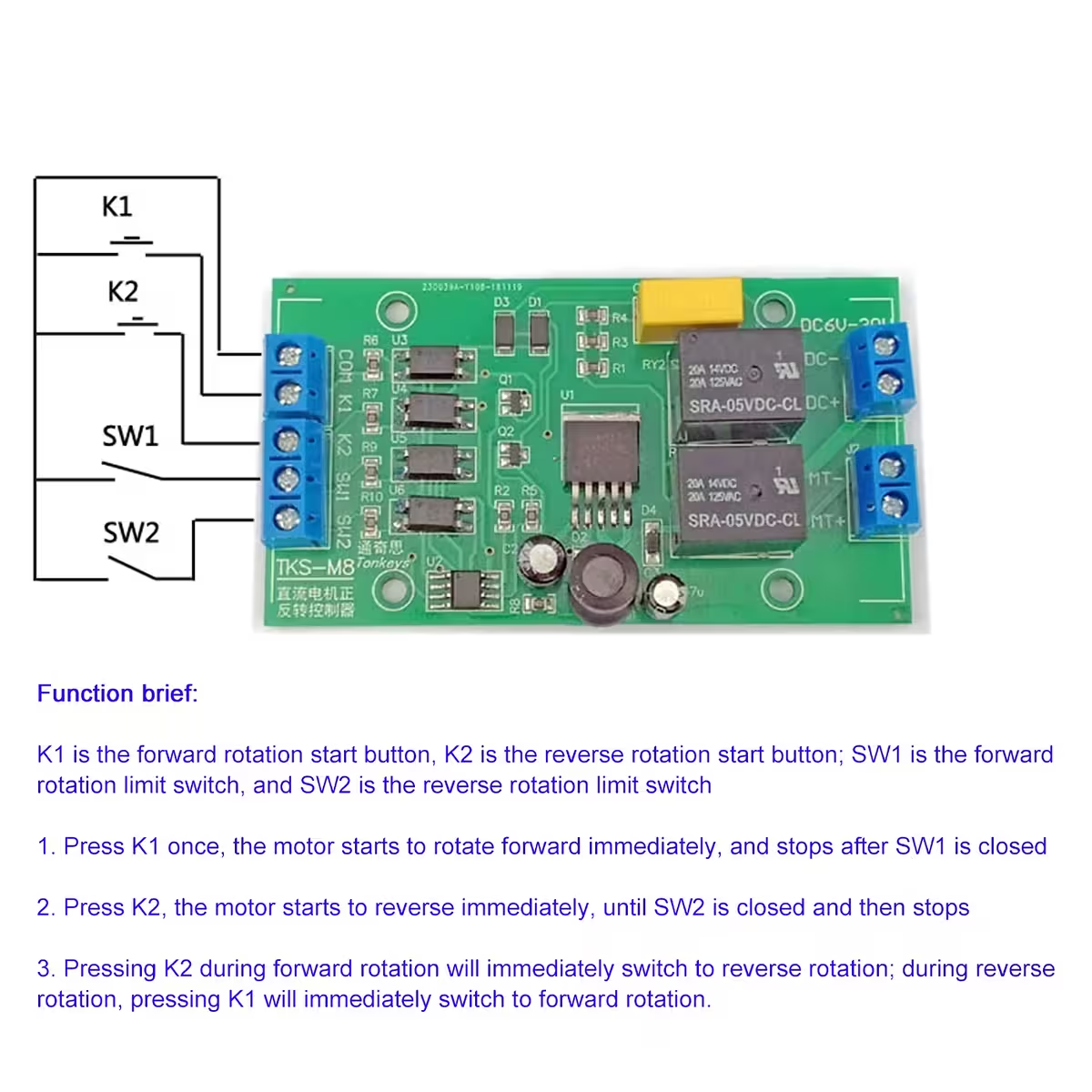
- Kytke virtalähde VIN+ ja VIN– -liitäntöihin (huomioi napaisuus).
- Kytke DC-moottori Motor+ ja Motor– -liitäntöihin.
- Valitse toimintatila: PO (jatkuva) tai P1 (jog).
- Kytke painikkeet tai ohjaussignaalit K1 (eteen) ja K2 (taakse) -tuloihin (active-low).
- Kytke halutessasi mekaaniset rajakytkimet tai NPN-NO-anturit SW1– ja SW2-tuloihin.
- Automaattinen A→B→A -liike: Kytke A-pisteen NO-kytkin K1:een ja B-pisteen NO-kytkin K2:een. Jätä SW1/SW2 kytkemättä.
- Arduino-integraatio: Kytke Arduinon GND ohjaimen GND-liitäntään. Kytke digitaaliset pinnit K1- ja K2-tuloihin. Aseta pinnit OUTPUT-tilaan ja käytä LOW-tilaa aktivointiin.
- Tarkista moottorin käynnistysvirta ja asenna virtalinjaan sopiva sulake.
Pakkauksen sisältö
- 1 × DC-moottorin suunnanvaihto-ohjain (Forward / Reverse), PO/P1-tilat
Usein kysytyt kysymykset
Mitä active-low tarkoittaa?
Tulo aktivoituu, kun jännite laskee alle 2V eli kun se kytketään maahan (GND). Tavalliset painikkeet, NO-rajakytkimet ja NPN-anturit toimivat näin, joten et tarvitse ylimääräisiä vastuksia tai logiikkapiirejä.
Mikä on PO- ja P1-tilan ero?
PO-tilassa lyhyt painallus käynnistää moottorin, joka jatkaa ajoa rajakytkimeen asti (automaatio). P1-tilassa moottori käy vain painikkeen painamisen ajan (manuaalinen säätö).
Voiko ohjaimen kytkeä suoraan Arduinoon?
Kyllä. Yhdistä Arduinon ja ohjaimen GND-pinnit. Käytä kahta digitaalista pinniä (OUTPUT). Kun pinni on LOW, komento aktivoituu. Arduino hoitaa logiikan, ohjain hoitaa tehon.
Voiko käyttää NC-rajakytkimiä (normal-closed)?
Ohjain on optimoitu NO (normal-open) -kytkimille. NC-kytkimet kääntävät logiikan ja voivat aiheuttaa ei-toivottua toimintaa. Käytä aina NO-kytkimiä SW1/SW2-liitännöissä.
Tarvitaanko jäähdytyssiiliä maksimivirralla?
Jos käytät jatkuvasti 20A virtaa tai intensiivistä sykliä, varmista riittävä ilmanvaihto. Pieni jäähdytyssiili tai tuuletin pidentää käyttöikää raskaassa kuormituksessa.
Miten luon automaattisen edestakaisen liikkeen ilman ajastinta?
Kytke A-pisteen NO-kytkin K1:een ja B-pisteen NO-kytkin K2:een (SW1/SW2 jätetään tyhjäksi). Kun moottori saavuttaa päätepisteen, kytkin aktivoi automaattisesti vastakkaisen suunnan.
Esittelyvideo
Tuotekuvat











Arviot
Tuotearvioita ei vielä ole.