
 EU
EU 





Integroitu Stepper-moottorinohjainmoduuli – Tehokkuutta ja tarkkuutta teollisuusautomaatiolle
Tämä integroitu ohjainmoduuli on erityisesti suunniteltu yksivaiheisille askelmoottoreille, tarjoten kokonaisratkaisun teollisuusautomaatiolle, CNC-ohjaukselle, robotiikalle ja mekaanisille pakkausjärjestelmille. Toimii itsenäisesti tai yhdessä muiden järjestelmien kanssa ilman Arduinoa tai Pythonia, ja on ihanteellinen teollisuuden ohjaussovelluksiin ja askelmoottorien tarkkaan sijoittamiseen.
Pääominaisuudet
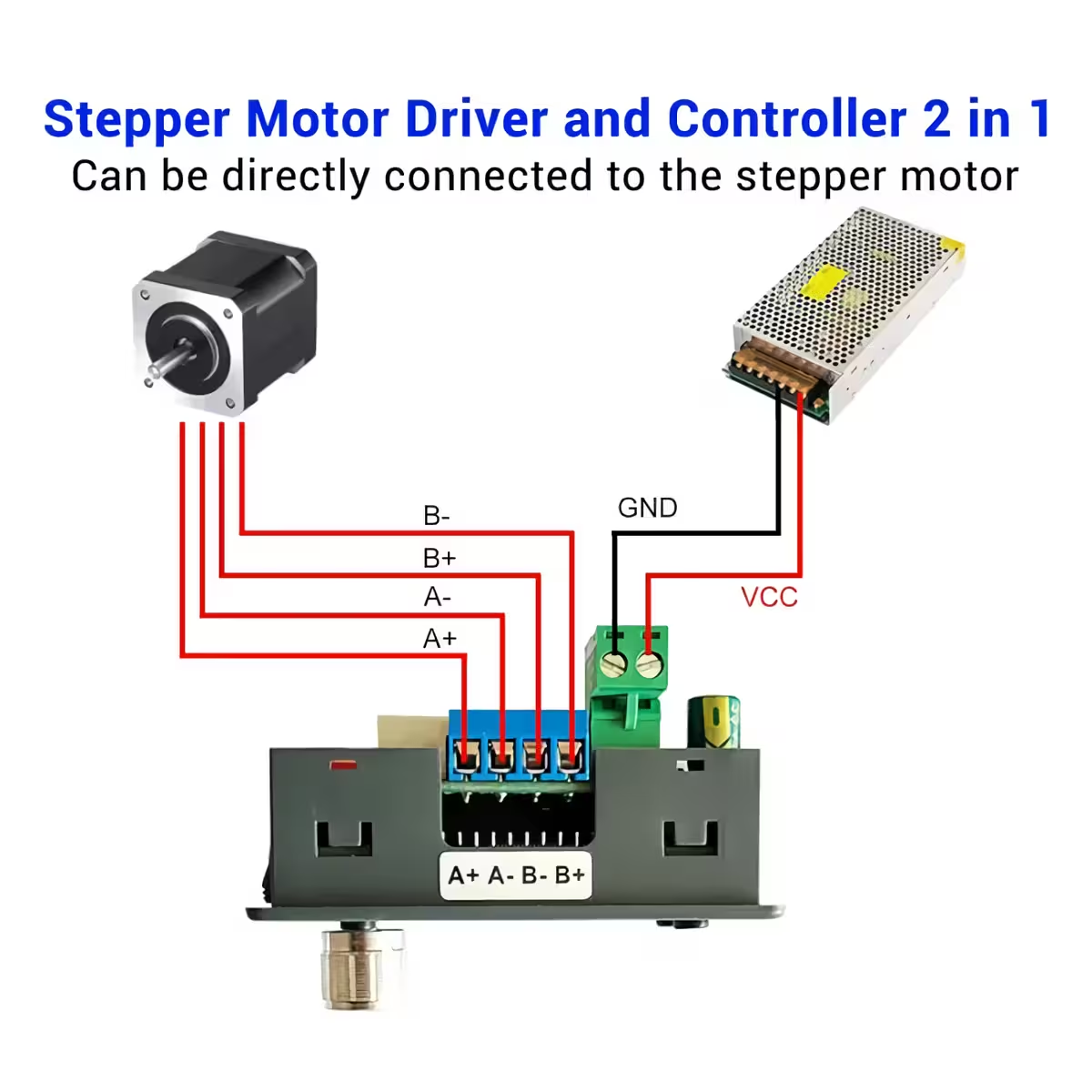
- Integroitu ohjain ja ajuri: Ohjaa askelmoottoria ja seuraa toimintatilaa reaaliajassa.
- Etuperä- ja takaperäpyöritys: Vaihda pyörityssuuntaa painikkeella tai potentiometrillä, automaattisesti työtilan mukaan.
- 3 ohjaustilaa: Esiasetettu tila, ohjaus ulkoisilla painikkeilla tai lisäajureilla.
- 9 työohjelmaa: Mukana ohjelmat eri sovelluksiin: eteen/taakse, viive, silmukat, automaattinen lukitus, pyörimisnopeus jne.
- HD LCD-näyttö: Näyttää nopeuden, kierroslukumäärän ja ohjausparametrit, muisti- ja tarkkuustoiminnolla.
Tekniset tiedot
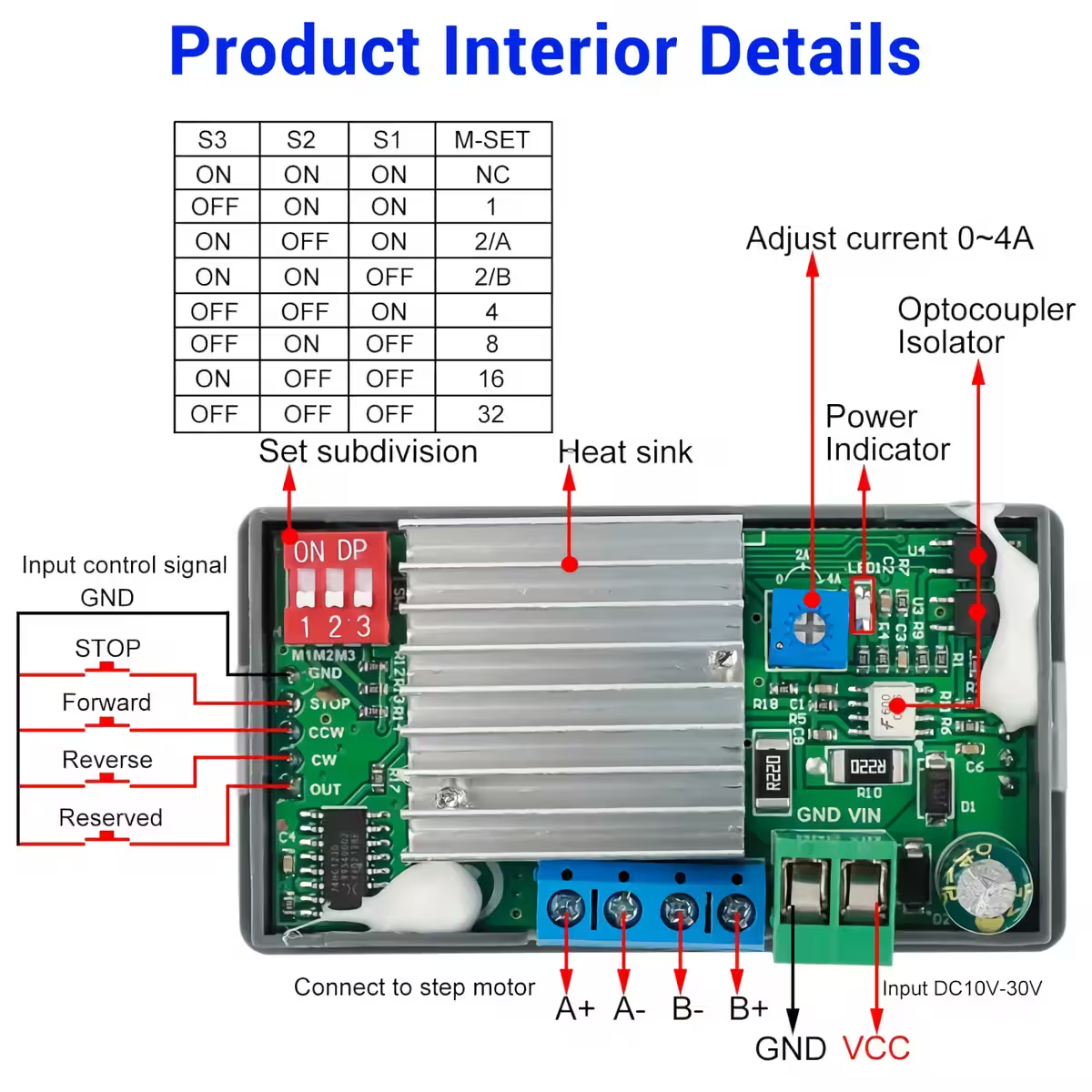
- Tulojännite: DC 5V–30V
- Ajurin lähtövirta: 4A (max)
- Ohjattavat akselit: Yksi akseli
- Yhteensopiva moottori: Stepper 42/57 (Nema17 / Nema23)
- Ohjausnopeus: 0,1–999 RPM
- Etupyöräytyksen impulssien määrä: 1–9 999 999
- Kierrosten määrä: 1–9 999 tai loputon silmukka
- Etupyöräytyksen viive: 0,0–999,9 s
- Takapyöräytyksen viive: 0,0–999,9 s
- Alijako: 1/2/4/8/16/32
- Kiihtyvyyden/hidastuksen ohjaus: Kyllä
- Käänteisen napaisuuden suoja: Kyllä
- Ohjaustilat: Automaatti/Käsin/Asennus
- Käyttölämpötila: -20°C–85°C
- Käyttökosteus: 5%–95% RH
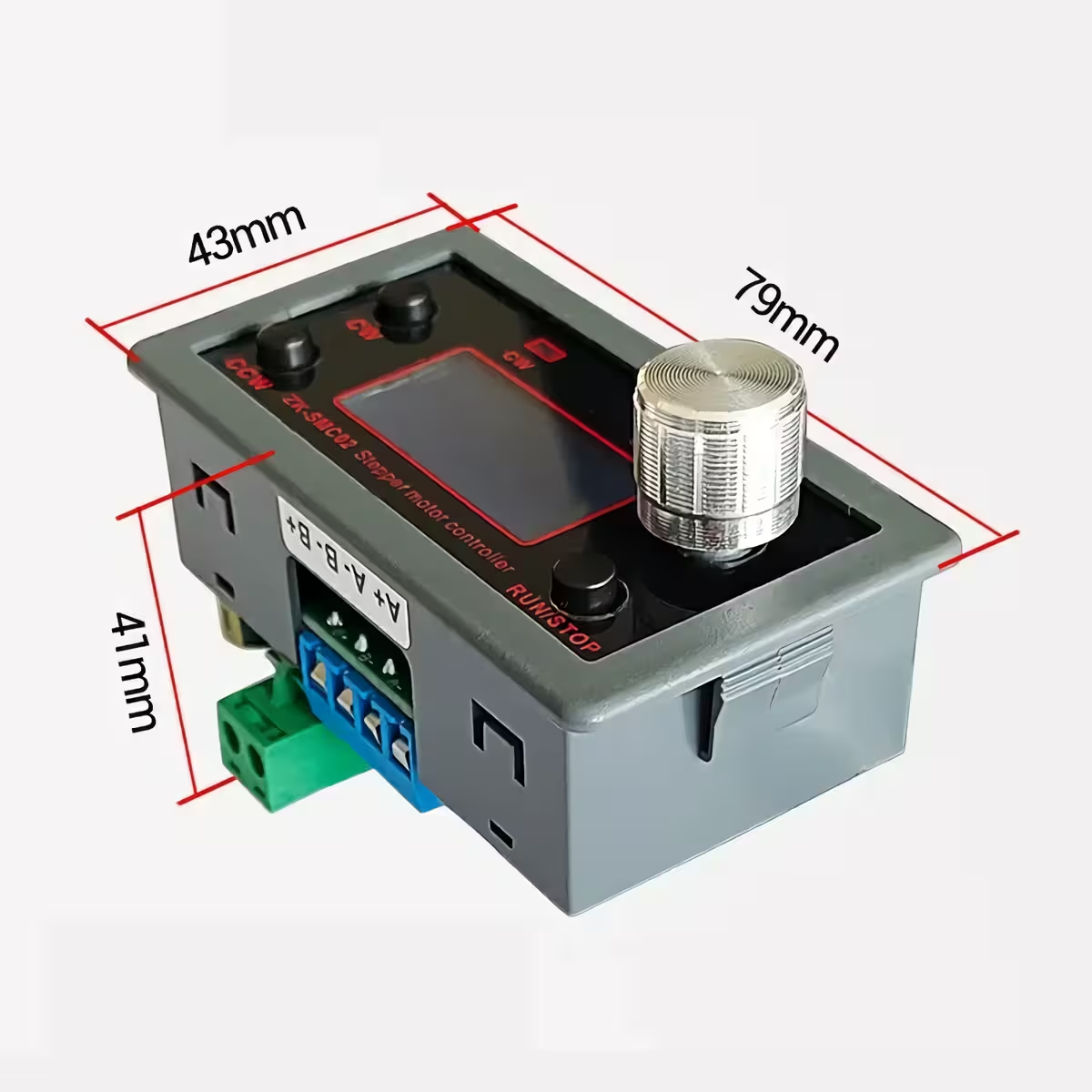
- Moduulin mitat: 79 x 43 x 41 mm
Konfigurointimenetelmät
1. Käyttöliittymä
- Ensimmäinen rivi näyttää pyörimisnopeuden RPM:ssä.
- Toinen rivi näyttää viiveajan tai kierroslukumäärän, asetettavissa F-10-valikosta.
- CW-painike: etupyöritys.
- CCW-painike: takapyöritys.
- RUN/STOP-painike: käynnistä/pysäytä.
- Potentiometri: nopeuden säätö molempiin suuntiin.
- Pidä potentiometriä >3 sekuntia: siirtyminen parametrien asetustilaan.
2. Parametrien käyttöliittymä
- Potentiometrin pyöritys valitsee parametrin F-01~F-13.
- Valittu parametri vilkkuu.
- Potentiometrin painallus valitsee arvon.
- Arvon muutos potentiometrin pyörityksellä tai bitin valinnalla.
- RUN/STOP-painike vahvistaa parametrit.
- Tallenna ja poistu asetustilasta >3 sekunnin jälkeen.
3. Lisätoiminto
- Itsenäinen toiminta kytkemällä vain virta ja moottori.
- Mahdollisuus liittää ulkoisia painikkeita lisäohjaukseen.
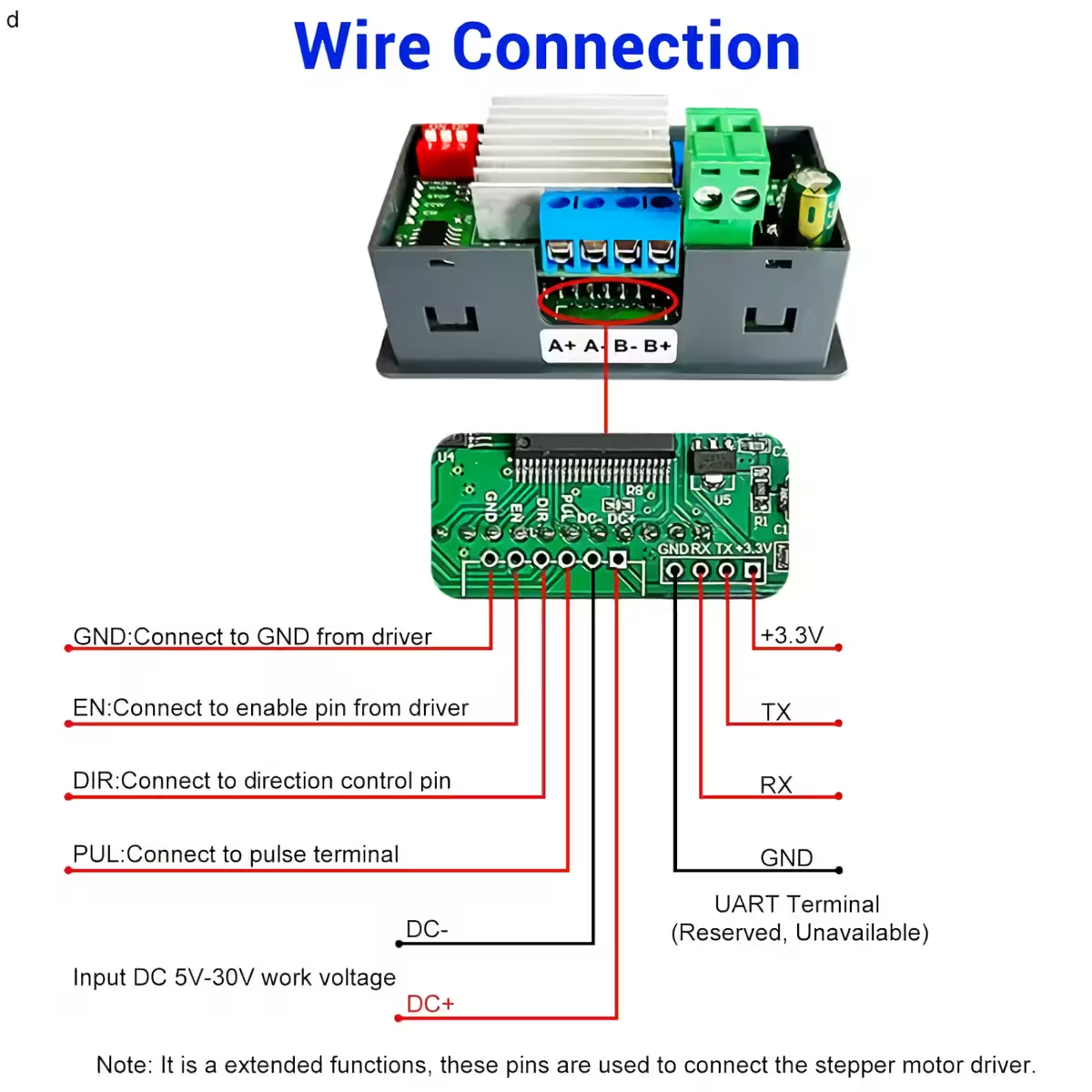
- Yhteensopiva muiden askelmoottoriajureiden kanssa – Auto/Käsin/Asennus-tila.
4. Työtilat
- Automaattiohjaustila: toimii asetetuilla parametreilla.
- Käsiohjaustila: vaatii painikkeiden liittämisen COM/STOP/CCW/CW-liittimiin.
- Asetustila: liitä muihin askelmoottoriajureihin.
Tärkeitä huomioita
- Yhteensopiva 2-vaiheisten askelmoottorien kanssa, riippumatta johtojen määrästä (4, 5, 6 tai 8).
- Sisältää integroidut ohjaimet ja ajurit, mutta voidaan liittää myös ulkoisiin ajureihin.
Sovellukset
- Teollisuuden automaattiohjaus
- CNC-koneet
- Mekaaninen pakkaus
- Elektroniikan käsittely ja testaus
- Automaattiset kokoonpanolinjat
- Robotiikka ja prosessien automaatio
- Sijoitus- ja liikejärjestelmät
| Parametri | Toiminto | Asetusalue | Oletusarvo |
|---|---|---|---|
| F-01 → ? | Valitse työtila. Katso seuraava taulukko. | P01~P09 | P01 |
| F-02 | Etupyörityksen impulssien määrä. Muuta High/Low-bit painamalla potentiometriä: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-03 | Etupyörityksen nopeus RPM | 0.1~999.9 | 10 |
| F-04 | Takapyörityksen impulssien määrä. Muuta High/Low-bit painamalla potentiometriä: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-05 | Takapyörityksen nopeus RPM | 0.1~999.9 | 10 |
| F-06 | Työkierrosten määrä (‘–-’ tarkoittaa loputonta silmukkaa) | 0~9999 tai loputon silmukka | 1 |
| F-07 | Etupyörityksen viive sekunteina. ±0.2 s | 0.0~999.9 | 0 |
| F-08 | Takapyörityksen viive sekunteina. ±0.2 s | 0.0~999.9 | 0 |
| F-09 | Impulssien määrä yhtä kierrosta kohden. Yksikkö on 10. Esim. jos askelkulma on 1.8° ja alijako on 8, impulssien määrä yhtä kierrosta kohden on 360/1.8*8 = 1600. Asetettava arvo on siis 160. | 1~9999 | 160 |
| F-10 | Aseta LCD-näytön parametrit: 0: Ensimmäinen rivi näyttää moottorin RPM-nopeuden, toinen viiveajan. 1: Ensimmäinen rivi näyttää RPM-nopeuden, toinen työkierrosten määrän. | 0 tai 1 | 0 |
| F-11 | Aseta moottorin toimintatila RUN/STOP-painikkeen jälkeen: 0: Hidas pysähdys. 1: Pysäytä heti. | 0 tai 1 | 0 |
| F-12 | Aseta kiihtyvyys/hidastus: 001 on hitain ja 100 on nopein. | 001~100 | 20 |
| F-13 | Aseta laitteen osoite | 001~255 | 1 |
| Työtila | Työprosessi |
|---|---|
| F-01 → P01 |
1. Moottori pyörii potentiometrin mukaan. Muut painikkeet eivät aktiivisia. 2. Moottori pyörii eteenpäin, CW-merkkivalo syttyy, kun potentiometri käännetään myötäpäivään. 3. Moottori pyörii taaksepäin, CCW-merkkivalo syttyy, kun potentiometri käännetään vastapäivään. |
| F-01 → P02 |
1. Moottori pyörii F-02 ja F-04 asetettujen impulssien mukaan. 2. Moottori pysähtyy impulssisarjan jälkeen, voidaan nollata potentiometrillä. 3. Silmukka toistuu F-06 määrittämän kierrosmäärän mukaan. |
| F-01 → P03 |
1. Moottori pyörii ja pysähtyy vuorotellen asetettujen impulssien mukaan. 2. Suunta eteen tai taakse asetetaan F-02/F-04 mukaan. 3. Nopeuden nollaus potentiometrillä. 4. Huom: Pysäytä moottori ennen suunnan vaihtoa. |
| F-01 → P04 |
1. Moottori pyörii F-02/F-04 mukaan ja pysähtyy, sitten silmukka F-06 kertaa. 2. Eteenpäin: F-02 → pysähdys F-07 → silmukka. 3. Taaksepäin: F-04 → pysähdys F-08 → silmukka. 4. RPM-nollaus potentiometrillä. 5. Huom: Pysäytä moottori ennen suunnan vaihtoa. |
| F-01 → P05 |
1. Moottori pyörii F-02/F-04 mukaan, palaa alkuun vastakkaiseen suuntaan ja silmukka F-06 kertaa. 2. Eteenpäin: F-02 → pysähdys F-07 → silmukka → paluu. 3. Taaksepäin: F-04 → pysähdys F-08 → silmukka → paluu. 4. RPM-nollaus potentiometrillä. 5. Huom: Pysäytä moottori ennen suunnan vaihtoa. |
| F-01 → P06 |
1. Moottori pyörii F-02/F-04 mukaan, vaihtaa suuntaa ja silmukka F-06 kertaa. 2. Eteenpäin: F-02 → pysähdys F-07 → käännös F-04 → pysähdys F-08 → silmukka. 3. Taaksepäin: F-04 → pysähdys F-08 → käännös F-02 → pysähdys F-07 → silmukka. 4. RPM-nollaus potentiometrillä. 5. Huom: Pysäytä moottori ennen suunnan vaihtoa. |
| F-01 → P07 |
1. Moottori pyörii impulssien mukaan ja palaa alkuun vastakkaiseen suuntaan. 2. Eteenpäin: F-02 → pysähdys F-07 → paluu. 3. Taaksepäin: F-04 → pysähdys F-08 → paluu. 4. RPM-nollaus potentiometrillä. |
| F-01 → P08 |
1. Moottori pyörii viiveiden F-07/F-08 mukaan ja pysähtyy, sitten silmukka F-06 kertaa. 2. Eteenpäin: F-07 → pysähdys F-08 → silmukka. 3. Taaksepäin: F-08 → pysähdys F-07 → silmukka. 4. RPM-nollaus potentiometrillä. 5. Huom: Pysäytä moottori ennen suunnan vaihtoa. |
| F-01 → P09 |
1. Moottori pyörii eteen F-02 mukaan, pysähtyy F-07 ajaksi, pyörii taakse F-04 mukaan, pysähtyy F-08 ajaksi, silmukka F-06 kertaa. 2. RPM-nollaus potentiometrillä. 3. Huom: Pysäytä moottori ennen suunnan vaihtoa. |












Recenzii
Nu există recenzii până acum.