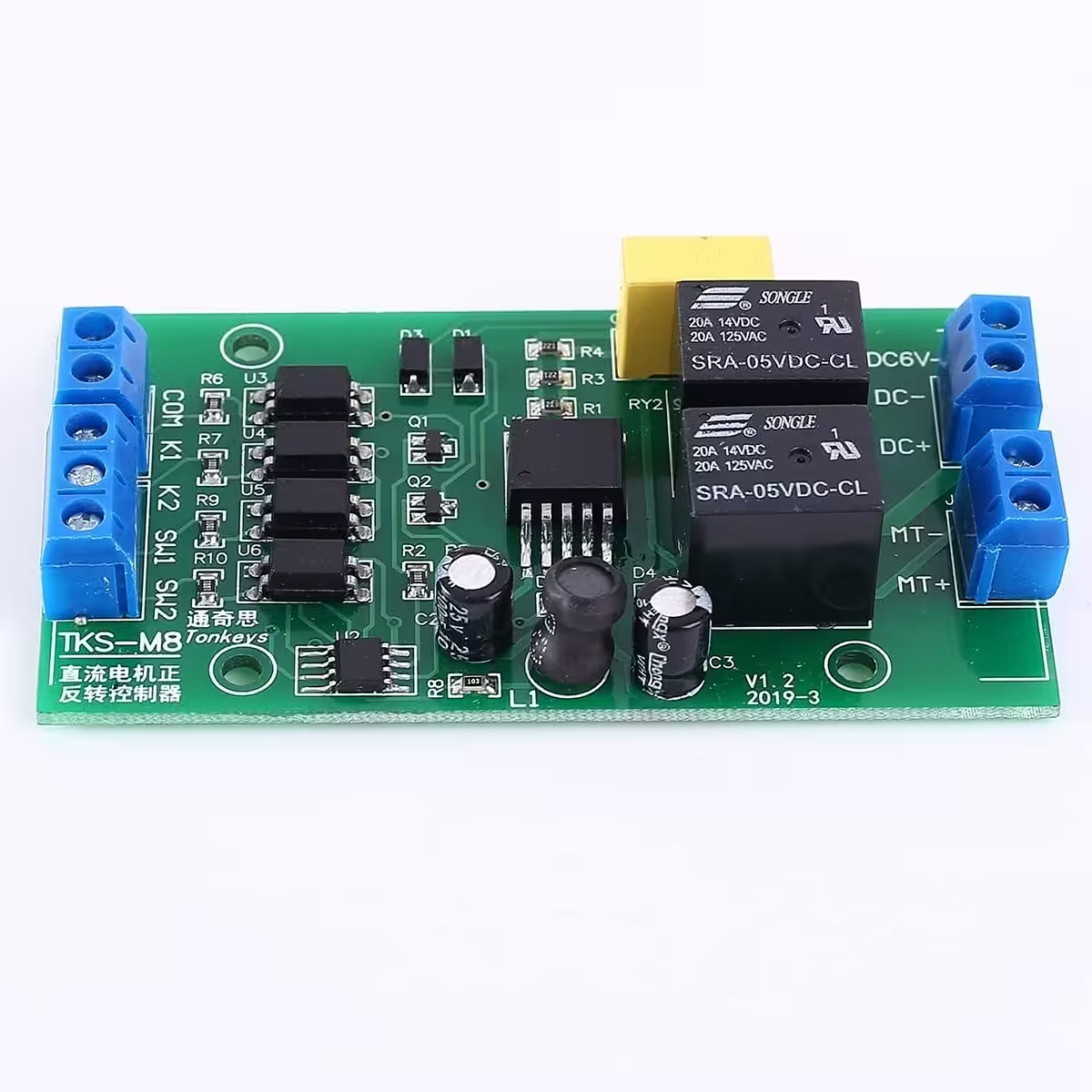
Moottorin suuntauksen ohjain – DC 4–40V, jopa 20A, PO/P1-tilat rajoittimilla
Kompakti moduuli DC-moottorien suunnan ohjaukseen, ihanteellinen rajoittimilla varustettuihin järjestelmiin, toimilaitteisiin, lineaarimekanismeihin tai DIY-projekteihin, joissa tarvitaan eteen- ja taaksepäin -toimintoja. Toimii hyvin laajalla jännitealueella 4–40V, suositeltu vakaa käyttö 6–36V. Liitetty moottori saa saman jännitteen kuin moduulin syöttö.
Tekniset tiedot
Käyttöjännite: DC 4–40V (suositus 6–36V)
Moduulin virrankulutus: n. 0,6W ilman moottoria, 0,1W lepotilassa
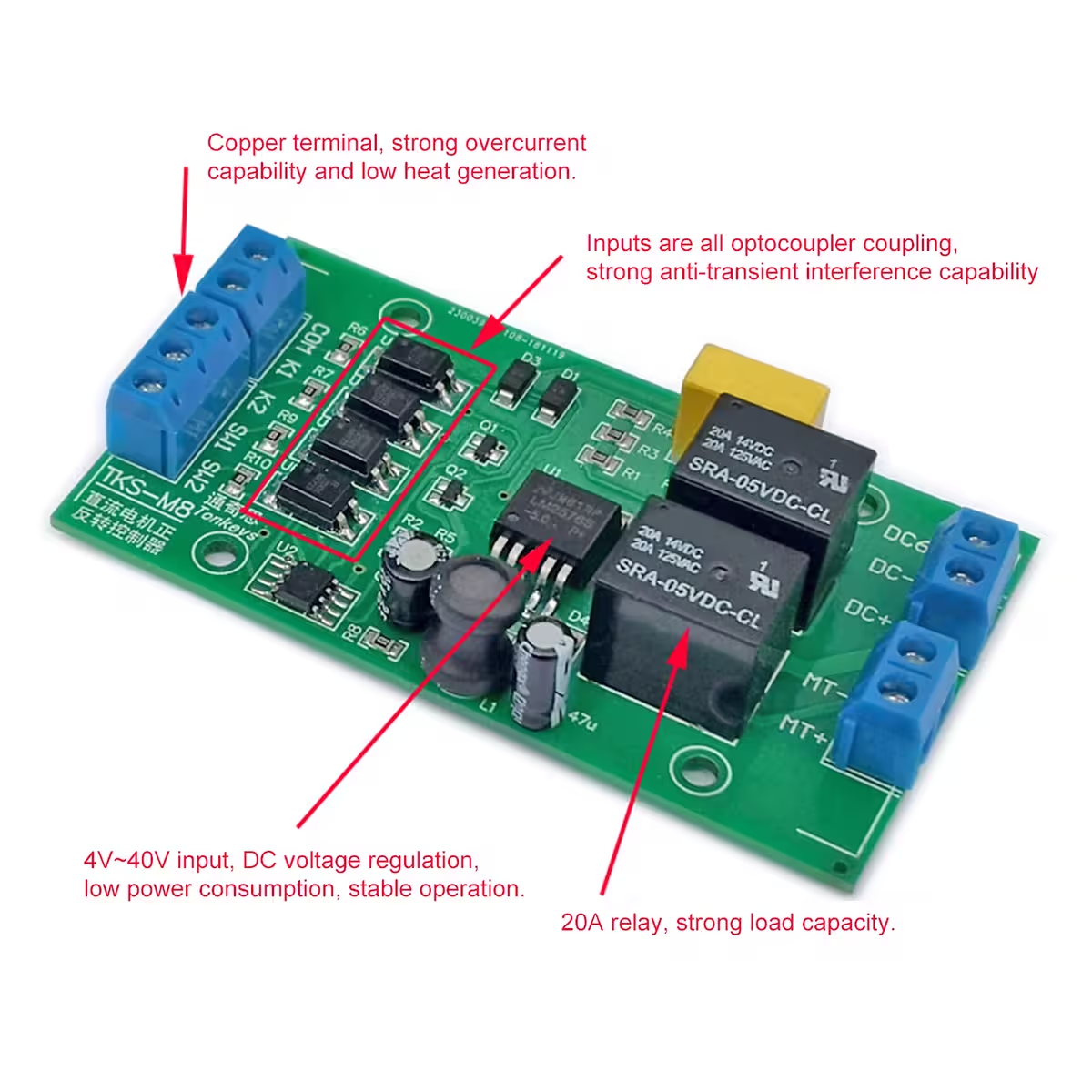
Maksimilähtövirta: jopa 20A
Käyttöikä: >150 000 toimimista
Suositeltu moottoriteho: jopa ~80W
Signaalitulon tyyppi: active-low (aktiivinen kun jännite < 2V)
Vasteaika: K1/K2 ≈ 20ms, SW1/SW2 ≈ 50ms
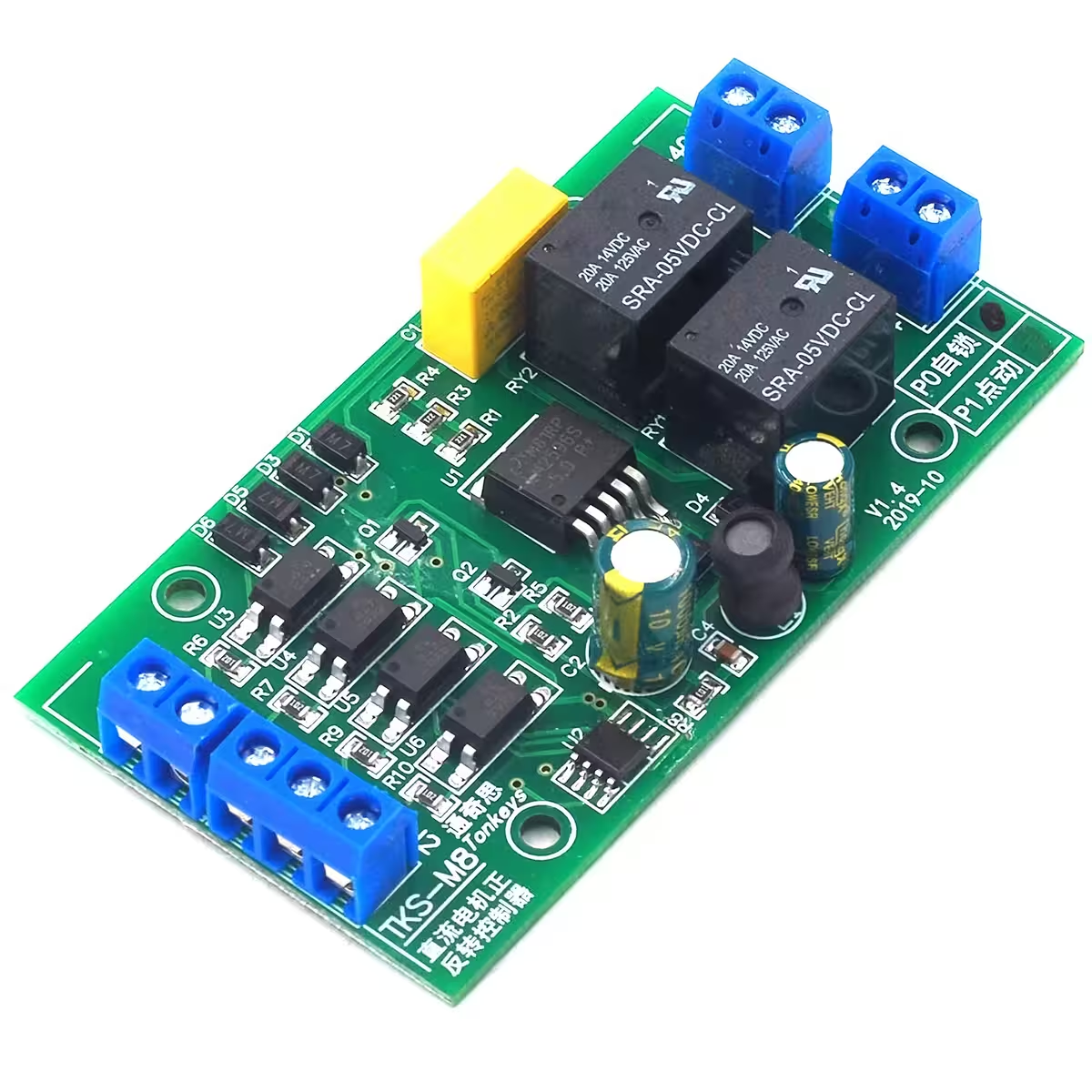
Käyttötilat: PO (autopito) / P1 (jog)
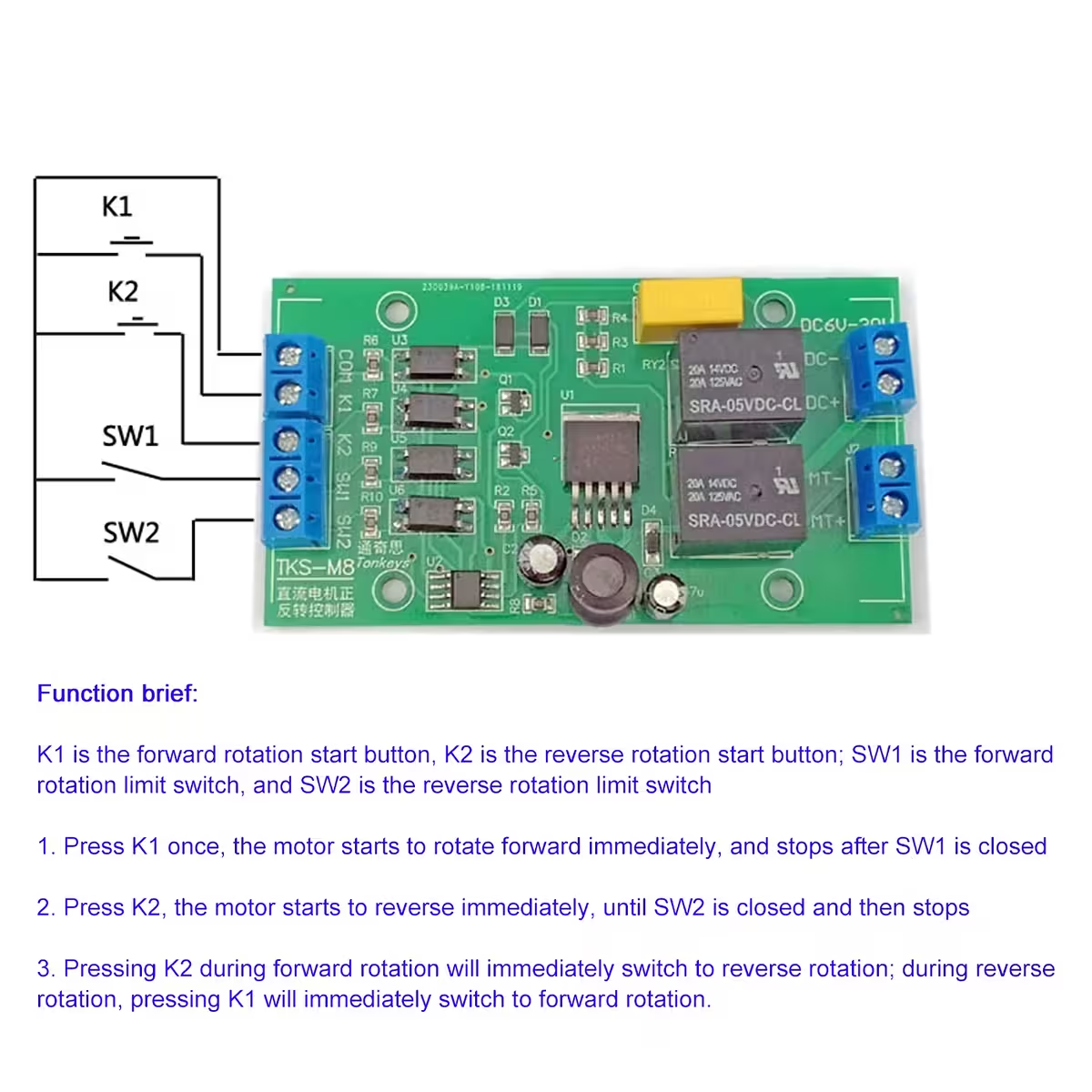
PO- ja P1-toimintatilat
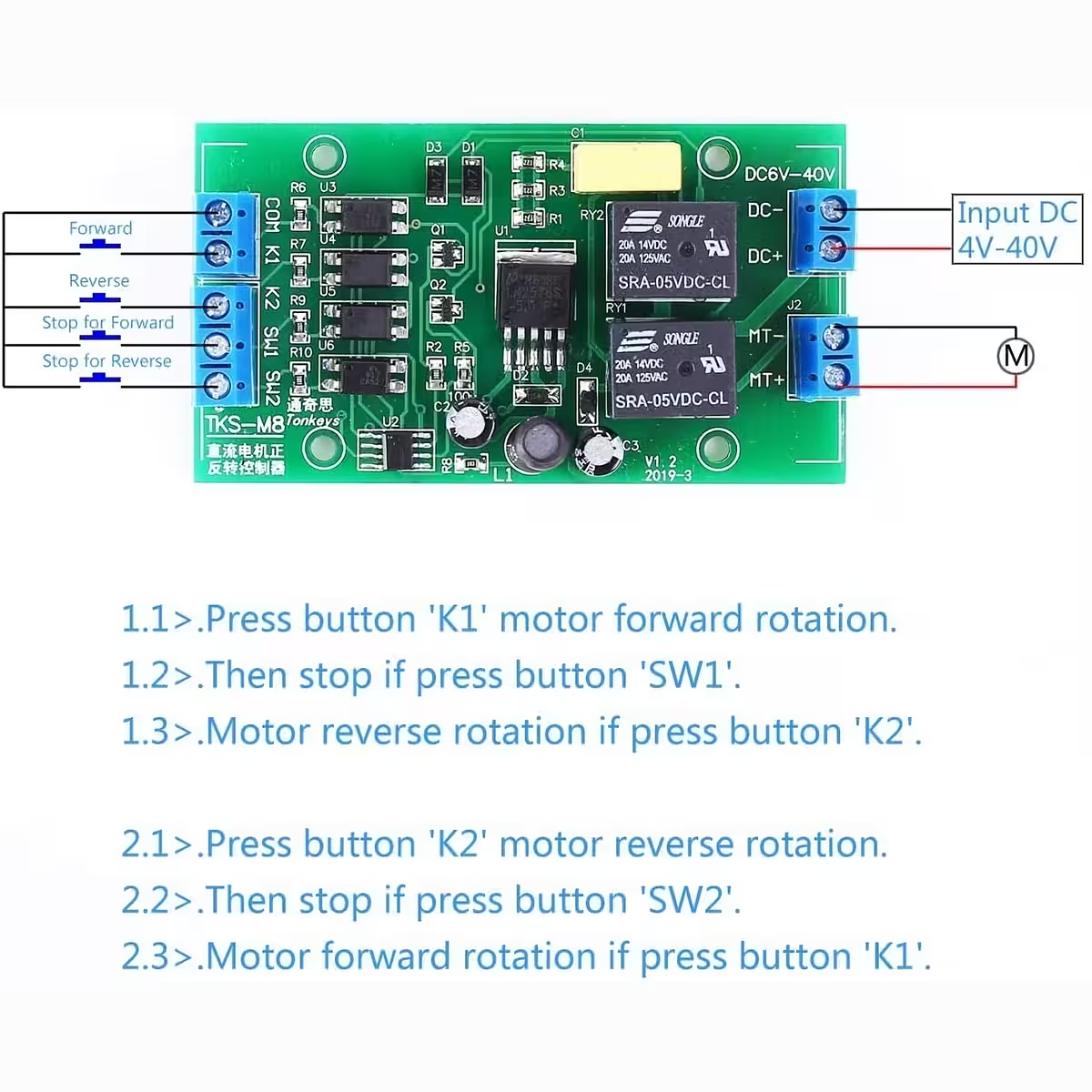
PO (Vakio / Autopito): Lyhyt impulssi K1:llä tai K2:lla käynnistää moottorin, joka jatkaa itsenäisesti rajoittimeen asti tai kunnes vastaanottaa vastakkaisen komennon.
P1 (Jog): Moottori toimii vain niin kauan kuin komento on aktiivinen. Ihanteellinen hienosäätöön.
Tulot ja rajoittimet
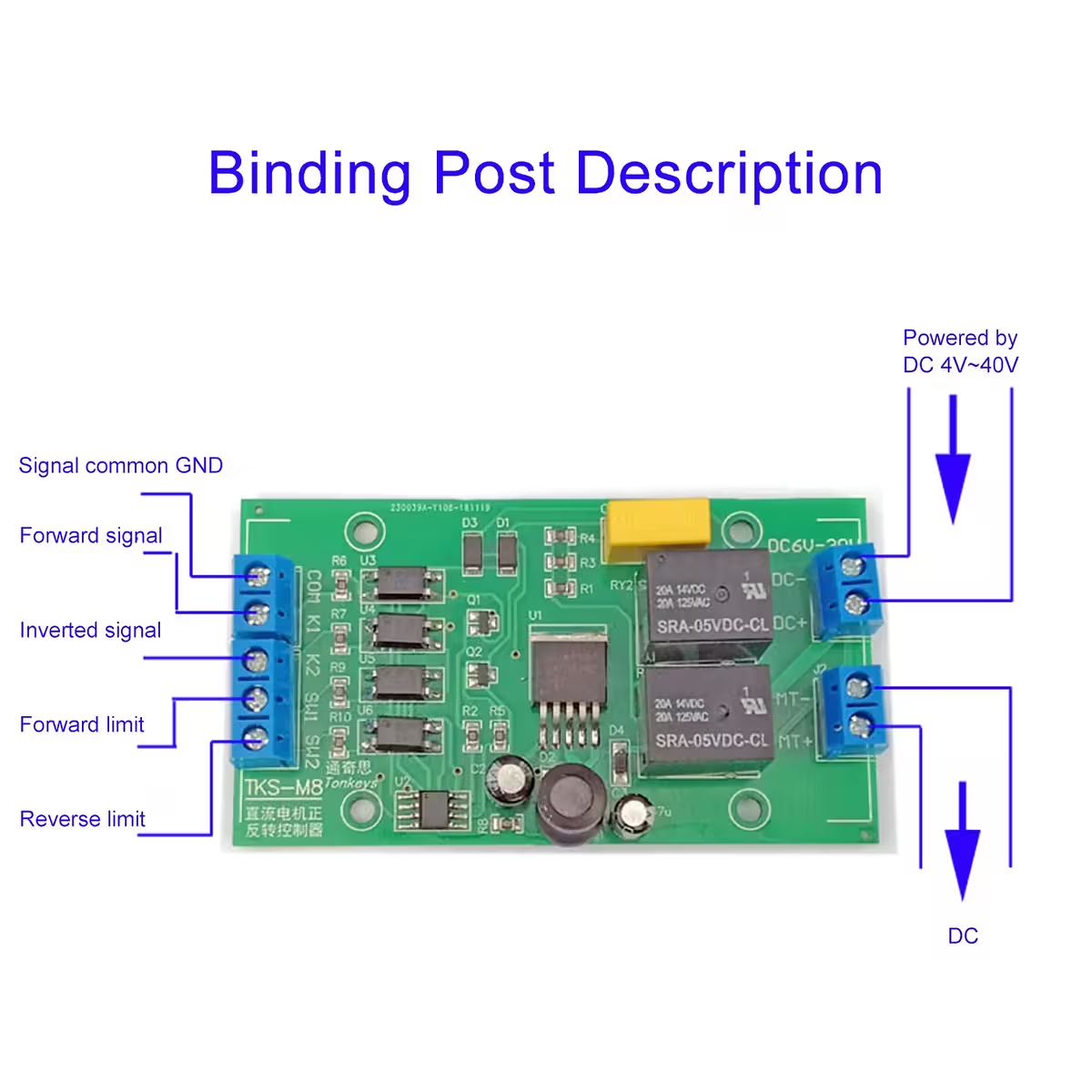
K1: eteenpäin -komento (active-low)
K2: taaksepäin -komento (active-low)
SW1: eteenpäin -rajoitin (suositus NO)
SW2: taaksepäin -rajoitin (suositus NO)
VIN+ / VIN-: moduulin syöttö (DC 4–40V)
Motor+ / Motor-: lähtö moottorille
Active-low-tulot mahdollistavat yksinkertaisten painikkeiden, mekaanisten rajoittimien tai NPN-NO-antureiden (3-johtiminen) käytön.
Rajoittimien ja automaattisen liikkeen toiminnallisuus
SW1 ja SW2 toimivat turvakatkaisuina: jos aktivoituna, moottori pysähtyy välittömästi. Voit luoda automaattisen liikkeen kahden pisteen välillä ilman sisäistä ajastinta:
Piste A → kytketty K1:een
Piste B → kytketty K2:een
SW1 ja SW2 eivät kytketty
NO-kytkimet paikoissa A ja B
Moottori liikkuu jatkuvasti A → B → A → B toistuvassa syklissä.
Ajastin-/aikarele-vaihtoehto
Ohjainta voidaan käyttää yhdessä ajastimen kanssa määrittämään tarkasti, kuinka kauan moottori liikkuu eteen- ja taaksepäin. Tämä mahdollistaa tarkat automaattiset syklit ilman manuaalista puuttumista. Voidaan käyttää yksinkertaisia ajastimia (IN+/IN–, O+/O–) tai malleja VCC, S1, S2.
Yhteensopivuus Arduino – kehittynyt ohjaus ja automaatio
Moduuli toimii täydellisesti Arduinon kanssa, koska tulot K1 ja K2 ovat active-low, eli aktivoituvat kun ne yhdistetään GND:hen. Tässä tapauksessa Arduino voi ohjata moottorin suuntaa vain kahdella digitaalisella pinnillä, ja ohjain huolehtii koko virran kytkentästä.
Kuinka liittää Arduino ohjaimeen
Arduino GND → ohjaimen GND (pakollinen)
Arduino digitaalinen pinni → K1 (eteenpäin)
Arduino digitaalinen pinni → K2 (taaksepäin)
Rajoittimet SW1/SW2 voidaan liittää suoraan ohjaimeen tai lukea Arduinolla.
Arduino toimii automaation ”aivona”, ja ohjain vastaa moottorin virtakytkennästä. Yhdistelmä on ihanteellinen kehittyneisiin ja täysin ohjelmoitaviin projekteihin.
Suorituskyky ja suositukset
12V:llä – maksimi 20A
24V:llä – käyttökelpoinen virta ~10A
Tarkista moottorin käynnistysvirta
Varmista asianmukaiset kaapelit ja liittimet
Suositeltu sulake suojausta varten
Pakkauksen sisältö
1 × Moottorin suuntauksen ohjain (Eteenpäin / Taaksepäin)
Esittelyvideo
Kuvagalleria
Arviot
Tuotearvioita ei vielä ole.
Kirjoita ensimmäinen arvio tuotteelle “DC 12V/24V moottorinohjain käänteisellä – DC-moottorin suunnanvaihto, manuaalinen tai automaattinen” Peruuta vastaus














Arviot
Tuotearvioita ei vielä ole.